Calibrating the Camera Network¶
Calibration of the camera network is done in several stages. Part of it is done in the lab using a custom calibration setup. Another part is done in the field using the sunphotometer of the Aeronet system.
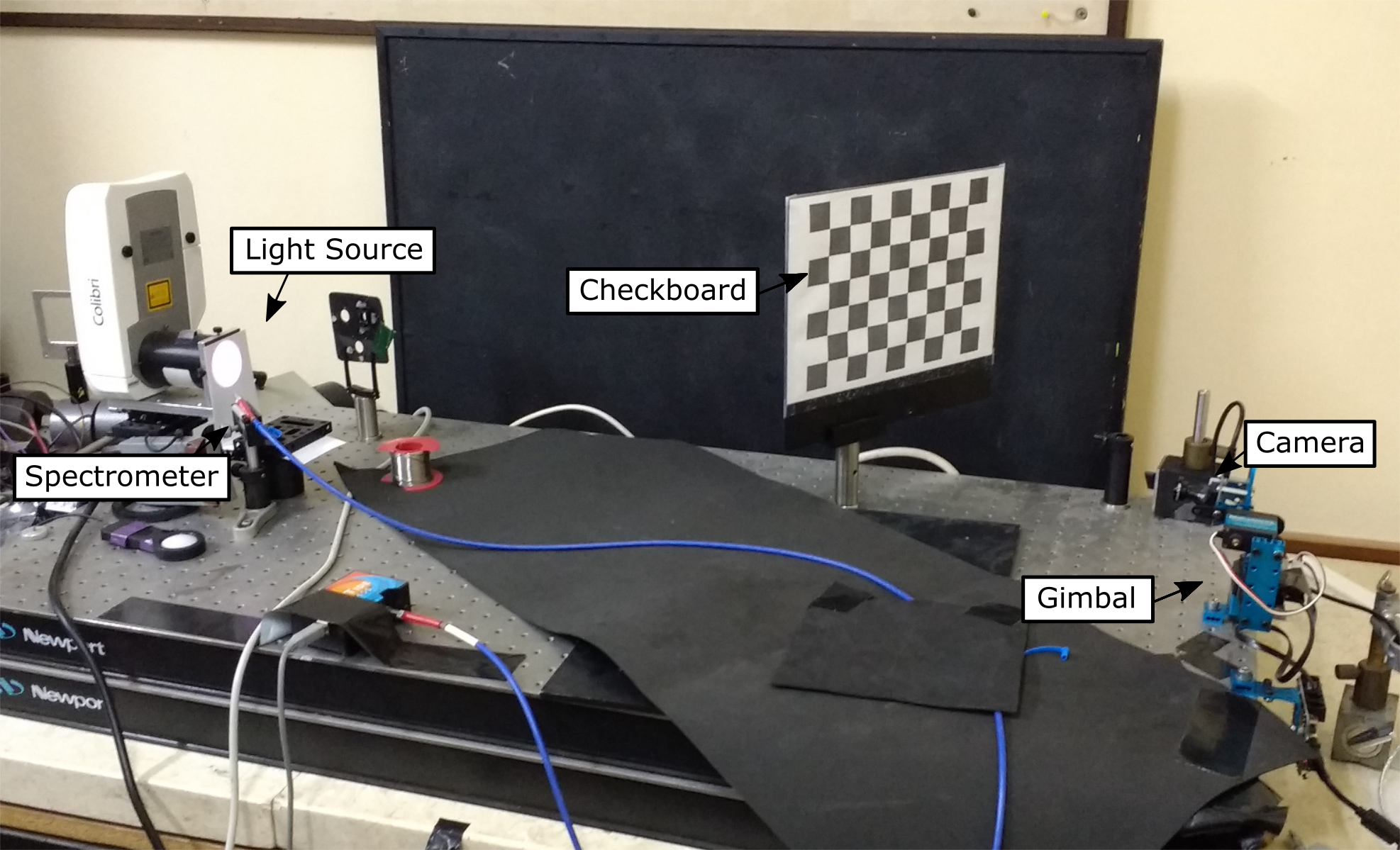
Fig. 1 Camera calibration setup.
Geometric Calibration¶
Geometric calibration is done
Intrinsic Calibration¶
Intrinsic calibration is done using a checkboard target and using the pyfisheye package which is based on the opencv fisheye calibration toolbox.
Extrinsic Calibration¶
Extrinsic calibration is the determination of the orientation of the camera in the global coordinates system. It is based on tracking the sun position.
Radiometric Calibration¶
Each camera is calibrated relation the a custom calibration setup (Figure :num:`calibration-setup`).